
Partager cette page :






Introduction to the theory of belief functions. An application to intelligent vehicles.
le 5 février 2013
de 15h30 à 17h00
ENS Rennes Salle du conseil
Plan d'accès
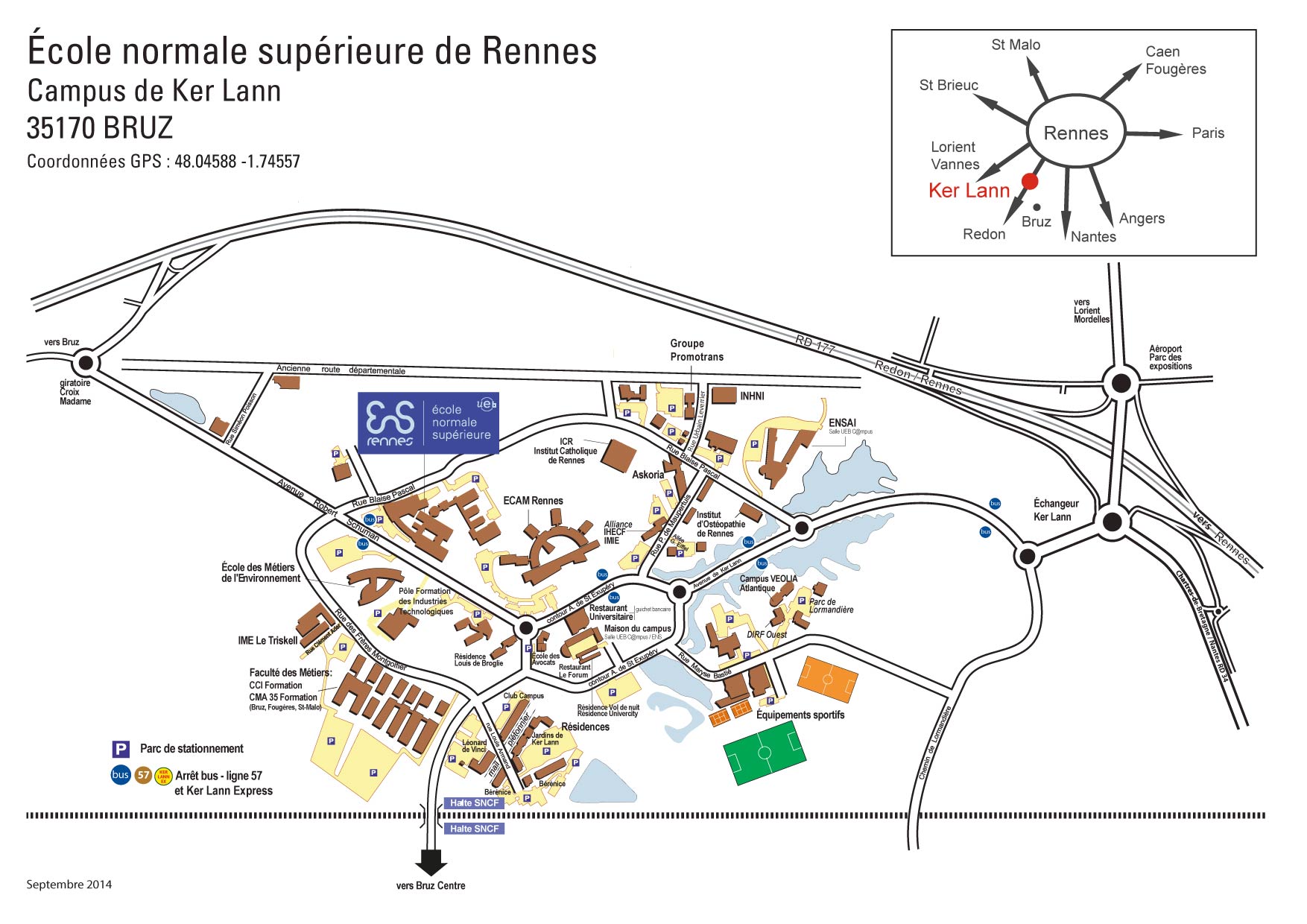{kind=link}
Intervention de Philippe Xu (Heudiasyc, Université de Technologie de Compiègne / Peking University).
Séminaire du département Informatique et télécommunications.
Scene understanding for advanced driver assistance systems, autonomous vehicles or, more generally, modern robotics, has led to consider many object classes as well as many sensors. Many algorithms have been developed over the last decades to tackle many different problems, each of them using different kinds of sensors. To make the most of the existing works, it is critical to find a way to properly fuse all relevant sources of information. Usual probabilistic approaches are not well suited for the fusion of many heterogeneous sources. Some crucial aspects, such as the representation of ignorance, are not well defined in the Bayesian framework. More recent theories, such the theory of belief functions, are much more adapted for information fusion. The theory of belief functions offers a well defined and elegant way to fuse information, and is also very flexible to include new sources of information as well as new classes of objects. slides
- Thématique(s)
- Formation, Recherche - Valorisation
- Contact
- François Schwarzentruber
Mise à jour le 12 septembre 2019
Contact
Archives
- Séminaires 2021-2022
- Séminaires 2020-2021
- Séminaires 2019-2020
- Séminaires 2018-2019
- Séminaires 2017-2018
- Séminaires 2016-2017
- Séminaires 2015-2016
- Séminaires 2014-2015
- Séminaires 2013-2014
- Séminaires 2012-2013
- Séminaires 2011-2012
- Séminaires 2010-2011
- Séminaires 2009-2010
- Séminaires 2008-2009
- Séminaires 2007-2008
- Séminaires 2006-2007
- Séminaires 2005-2006
- Séminaires 2004-2005
- Séminaires 2003-2004
- Séminaires 2002-2003