
Partager cette page :






An Overview on Collective Coordination of Multiple Robots
le 14 octobre 2014
16h00
ENS Rennes Salle du conseil
Plan d'accès
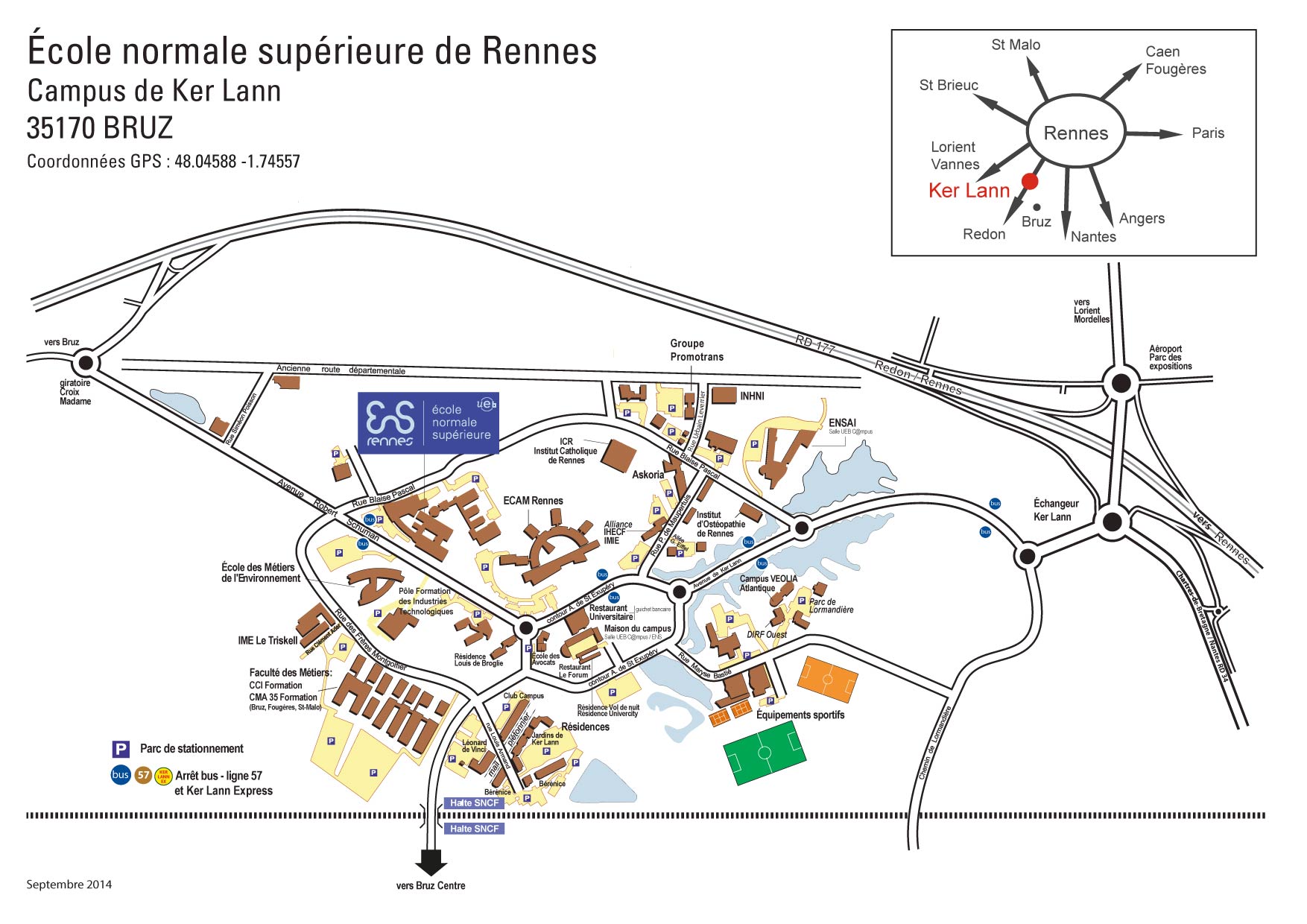{kind=link}
Intervention de Paolo Robuffo Giordano (IRISA, équipe Lagadic, CNRS, Rennes).
Séminaire du département Informatique et télécommunications.
In this talk I will give a brief overview of some fundamentals about the collective (and decentralized) coordination of multiple robots, with an emphasis on the main motivations, assumptions, mathematical tools, as well as the theoretical and practical difficulties one faces when devising multi-robot coordination schemes. Some videos of multi-robot experiments, with quadrotor UAVs employed as robotic platform, will also be shown with the aim of illustrating the key concepts.
- Thématique(s)
- Formation, Recherche - Valorisation
- Contact
- François Schwarzentruber
Mise à jour le 9 septembre 2019
Contact
Archives
- Séminaires 2021-2022
- Séminaires 2020-2021
- Séminaires 2019-2020
- Séminaires 2018-2019
- Séminaires 2017-2018
- Séminaires 2016-2017
- Séminaires 2015-2016
- Séminaires 2014-2015
- Séminaires 2013-2014
- Séminaires 2012-2013
- Séminaires 2011-2012
- Séminaires 2010-2011
- Séminaires 2009-2010
- Séminaires 2008-2009
- Séminaires 2007-2008
- Séminaires 2006-2007
- Séminaires 2005-2006
- Séminaires 2004-2005
- Séminaires 2003-2004
- Séminaires 2002-2003